主要的激光测距方法有哪些?

目前,我们通常能见到的测距方法,从大类上可以分为:激光飞行时间(Time of Fly,TOF)法以及三角法。
激光飞行时间法可以分为两类,一类是脉冲调制(脉冲测距技术),一类是对激光连续波进行强度的调制,通过相位差来测量距离信息的相位测距。
我们能在市面上见到的测距仪,或者说单线、多线激光雷达,基本上都是采用这三类测距方法。
激光脉冲测距技术

激光脉冲测距技术的原理非常简单:通过测量激光脉冲在雷达和目标之间来回飞行时间获取目标距离的信息。这里用了一个基准,就是光的速度。所有的测量都必须有一个基准,对于一束激光来说有两个基准:速度和频率(两个最准的基准),因为 TOF 用的基准就是激光的飞行速度。
上述提到的三种测距方式,我认为技术难点最大的是脉冲测距的方式。但它带来的优点非常明显:测量速度非常快。由于通过高峰值的激光来进行测量,其抗强光的干扰能力非常强。
缺点是测距分辨率提升难度高,探测电路难度大。举个例子,如果要做到相位测距 1.5 个毫米的分辨率,我们就需要把计时时钟分辨率做到 10 个皮秒,也就相当于 100G 带宽,这是一个非常难的技术。
激光相位测距

激光相位测距,比如说常见的手持式激光测距仪,采用的就是相位测距的方式来实现。它主要通过测量被强度调制的连续波激光信号在雷达与目标之间来回飞行产生的相位差获得距离信息。
这种技术最大的优点:测距分辨率非常高,目前一般市面上的相位测距仪都可以达到毫米量级分辨率。
缺点是测量速度比脉冲测距慢,毕竟我们把一个相位差测准,至少要做上几十甚至上百个周期,实际上就相当于把它的测量时间变相拉长,那么它的测量速度相对来说比较低。此外,它的测量精度比较容易受到目标形状运动影响。如果在测量的光斑里,两个目标一前一后,实际上它测出来的具体信息,是这两个目标距离的一个平均值,而不是前一个目标信息或后一个目标信息。
但在脉冲测距里,就很容易将这样的信息分开。比如,一个激光脉冲,如果我们能够把脉冲宽度做到 10 个纳秒,那么我们就可以把一个目标前后相距三十厘米的目标,通过多次回波的方法将其区分出来。
这种方式在相位测距里就很难把它区分出来。因为在测量过程中,它的时间会比较长,目标运动带进来的距离信息,把它引入到测量值里,实际上它测的是一个平均距离信息,而不是实时信息。但是激光脉冲测距,实际上是当前位置实时的信息。
这也是为什么车用或机器人用的激光雷达往往会采用激光脉冲的测距技术,而不采用相位测距技术。
三角法测距

三角法测距就是通过测量激光照射点在相机中的成像位置获得距离信息。三角法测距最大的有优点就是技术难度低,成本也很低,在近距离测距精度也很高。比如工业用可以做到百微米测距精度。
但缺点是,它的精度会随着距离的增加逐渐变差,基本上没法与脉冲测距以及相位测距相比。
另外一点,因为 CMOS 相机必须要用一个连续的激光同步进行照明,它的平均功率相对来说比较低,抗干扰能力会非常强,这种测距方式一般适合室内近距离工作,而不适合在户外强光背景或者室内强光背景下工作。
三角法测距比较适合用于机器人等对性能要求不高的场景。

从上图我们可以看出,脉冲测距除了成本和技术难度比较大以外,它在其他各方面的性能都比较优秀。当然,它的测距精度会比相位测距精度略低一些。但是这种精度,按目前的技术,我们基本上可以达到厘米量级,甚至是几个毫米量级的测距精度,基本上能满足我们多场合的使用要求。
我们主要的方向就是用脉冲测距的方式来做单线雷达,包括多线雷达。
推荐新闻
-
2022-07-25
7月27日-28日,中国高速公路信息化大会等你来
2022年7月27-28日,第二十四届中国高速公路信息化大会在长沙国际会展中心举办。宁波傲视智绘光电科技有限公司将参展本...
-
2022-03-22
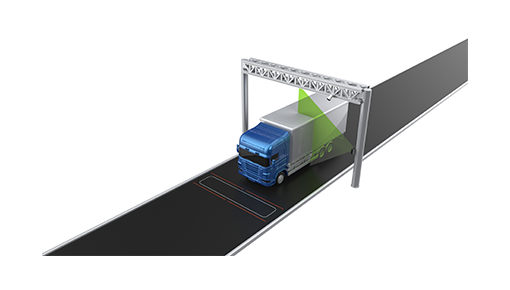
公路治超黑科技:激光雷达车辆超高超限检测
智能交通系统是未来交通系统的发展方向,它是将先进的信息技术、数据通讯传输技术、电子传感技术、控制技术及计算机技术等有效地...
-
2021-10-18
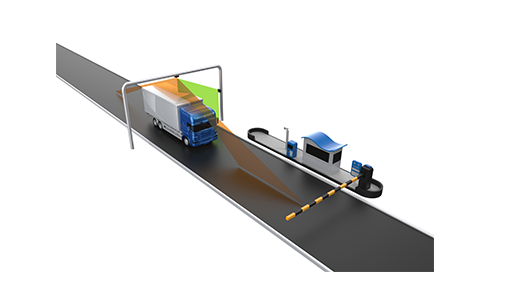
科技治超,让超载超限无处藏
治超非现场执法是是科技治超中的主要依托,宁波傲视智绘光电科技有限公司顺应国家ETC及公路治超政策趋势,基于激光雷达技术研...
-
2021-10-11
一种公路收费无障碍的动态称重系统
动态称重系统通过对车辆数据的记录和行为的监控,对特征参数的逻辑分析可以准确判断车辆行驶的状态和作弊行为,并能够有效避免雨...